Xuxin Chengxucheng [at] ucsd.edu I am a final-year PhD student at UC San Diego working with Xiaolong Wang. I have had the opportunity to work with Deepak Pathak at CMU, as well as Koushil Sreenath, Pieter Abbeel at UC Berkeley. I build real-world robot systems. I love snowboarding 🏂 and scuba diving 🤿 in my free time. CV | GitHub | Google Scholar | Twitter |

|
Highlights
|
News
|
Research
* denotes equal contribution
|
ManiFlow: A General Robot Manipulation Policy via Consistency Flow TrainingGe Yan,Jiyue Zhu*,Yuquan Deng*,Shiqi Yang,Ri-Zhao Qiu,Xuxin Cheng,Marius Memmel,Ranjay Krishna†,Ankit Goyal†,Xiaolong Wang†,Dieter Fox† CoRL 2025 Webpage | arXiv | Code | BibTeX |

|
GMT: General Motion Tracking for Humanoid Whole-Body ControlZixuan Chen*,Mazeyu Ji*,Xuxin Cheng,Xuanbin Peng,Xue Bin Peng†,Xiaolong Wang† arXiv 2025 Webpage | arXiv | Video | BibTeX |

|
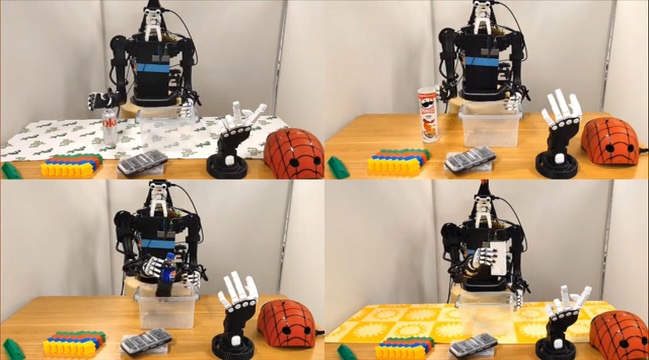
AMO: Adaptive Motion Optimization for Hyper-Dexterous Humanoid Whole-Body ControlJialong Li*,Xuxin Cheng*,Tianshu Huang*,Shiqi Yang,Ri-Zhao Qiu,Xiaolong Wang RSS 2025 Webpage | arXiv | Video | BibTeX |

|
Humanoid Policy ~ Human PolicyRi-Zhao Qiu*,Shiqi Yang*,Xuxin Cheng*,Chaitanya Chawla,Jialong Li,Tairan He,Ge Yan,David J. Yoon,Ryan Hoque,Lars Paulsen,Ge Yang,Jian Zhang,Sha Yi,Guanya Shi,Xiaolong Wang CoRL 2025 Webpage | arXiv | BibTeX |

|
Exbody2: Advanced Expressive Humanoid Whole-Body ControlMazeyu Ji*, Xuanbin Peng*, Fangchen Liu, Jialong Li, Ge Yang, Xuxin Cheng, Xiaolong Wang arXiv 2025 Webpage | arXiv | Video | BibTeX |

|
Mobile-TeleVision: Predictive Motion Priors for Humanoid Whole-Body ControlChenhao Lu*, Xuxin Cheng*, Jialong Li*, Shiqi Yang, Mazeyu Ji, Chengjing Yuan, Ge Yang, Sha Yi, Xiaolong Wang ICRA 2025 Webpage | arXiv | Code | Video | BibTeX |

|
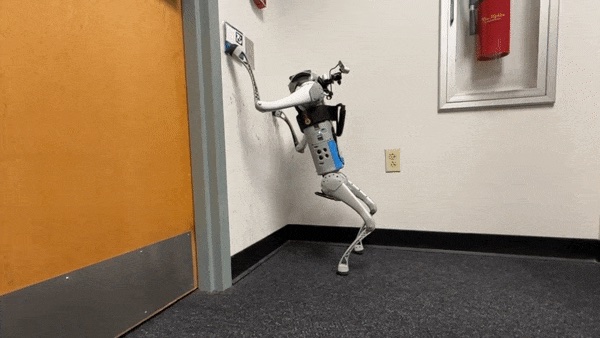
Helpful DoggyBot: Open-World Object Fetching using Legged Robots and Vision-Language ModelsQi Wu, Zipeng Fu, Xuxin Cheng, Xiaolong Wang, Chelsea Finn IROS 2025 Webpage | arXiv | Video | BibTeX |

|
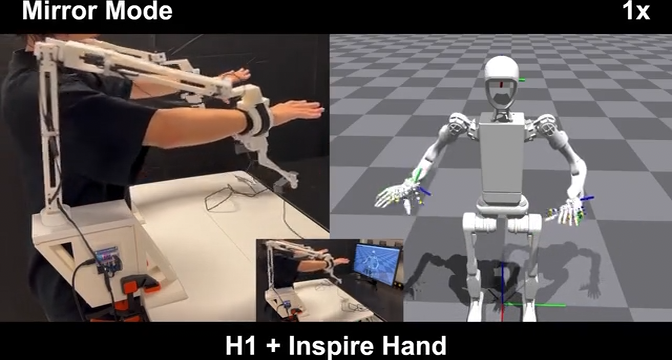
Open-TeleVision: Teleoperation with Immersive Active Visual FeedbackXuxin Cheng*, Jialong Li*, Shiqi Yang, Ge Yang, Xiaolong Wang CoRL 2024 Webpage | arXiv | Code | Video | Media | BibTeX |
|
ACE: A Cross-platform Visual-Exoskeletons for Low-Cost Dexterous TeleoperationShiqi Yang, Minghuan Liu, Yuzhe Qin, Runyu Ding, Jialong Li, Xuxin Cheng, Ruihan Yang, Sha Yi, Xiaolong Wang CoRL 2024 Webpage | arXiv | Code | Video | BibTeX |

|
Visual Whole-Body Control for Legged Loco-ManipulationMinghuan Liu*, Zixuan Chen*, Xuxin Cheng, Yandong Ji, Ruihan Yang, Xiaolong Wang CoRL 2024 (Oral) Webpage | arXiv | Code | Video | BibTeX |

|
Expressive Whole-Body Control for Humanoid RobotsXuxin Cheng*, Yandong Ji*, Junming Chen, Ruihan Yang, Ge Yang, Xiaolong Wang RSS 2024 Webpage | arXiv | Code | Video | BibTeX |

|
Extreme Parkour with Legged RobotsXuxin Cheng*, Kexin Shi*, Ananye Agarwal, Deepak Pathak ICRA 2024 CoRL 2023 Generalist / Roboletics / Deployable Workshop (Oral) Webpage | arXiv | Code | Video | Media | BibTeX |
|
Legs as Manipulator: Pushing Quadrupedal Agility Beyond LocomotionXuxin Cheng, Ashish Kumar, Deepak Pathak ICRA 2023 Webpage | arXiv | Video | Media | BibTeX |

|
Deep Whole-Body Control: Learning a Unified Policy for Manipulation and LocomotionZipeng Fu*, Xuxin Cheng*, Deepak Pathak CoRL 2022 (Oral, Best System Paper Finalist) Webpage | arXiv | Video | Media | BibTeX |


|
Reinforcement Learning for Robust Parameterized Locomotion Control of Bipedal RobotsZhongyu Li, Xuxin Cheng, Xue Bin Peng, Pieter Abbeel, Sergey Levine, Glen Berseth, Koushil Sreenath ICRA 2021 Webpage | arXiv| IEEE | Video | BibTeX |